

Above: Left glove to the left, and right glove to the right.
And yes, those are purple surgical gloves.
Above: Looks like I'm about to do some surgery!
Additionally! In February, just this past weekend (2/16-17), I attended the Motorama 2013 event in Harrodsburg, PA, for the sole purpose of Robot Conflicts - a Robot competition held there. I road-tripped down with 4 other guys, 3 of whom brought robots to compete. From what I've gathered, Motorama was a showcase of pimped out dirt bikes, go karts, and other wheeled vehicles that race for some prizes. It worked like a convention + fair + vehicle show, with tents of sponsored racers, 100+ vendors, a really really big carnival-style food court, and other such rooms and events. I only stuck around the Robot arena, so I didn't fully experience the event, but I didn't mind- The robot event alone was awesome enough!

Above: Charles, Dane, and Adam working on last minute adjustments on their robots.

Above: View of the audience from behind the robot combat stage.
There's another stand on the other side of the stage, but this side was always more populated.

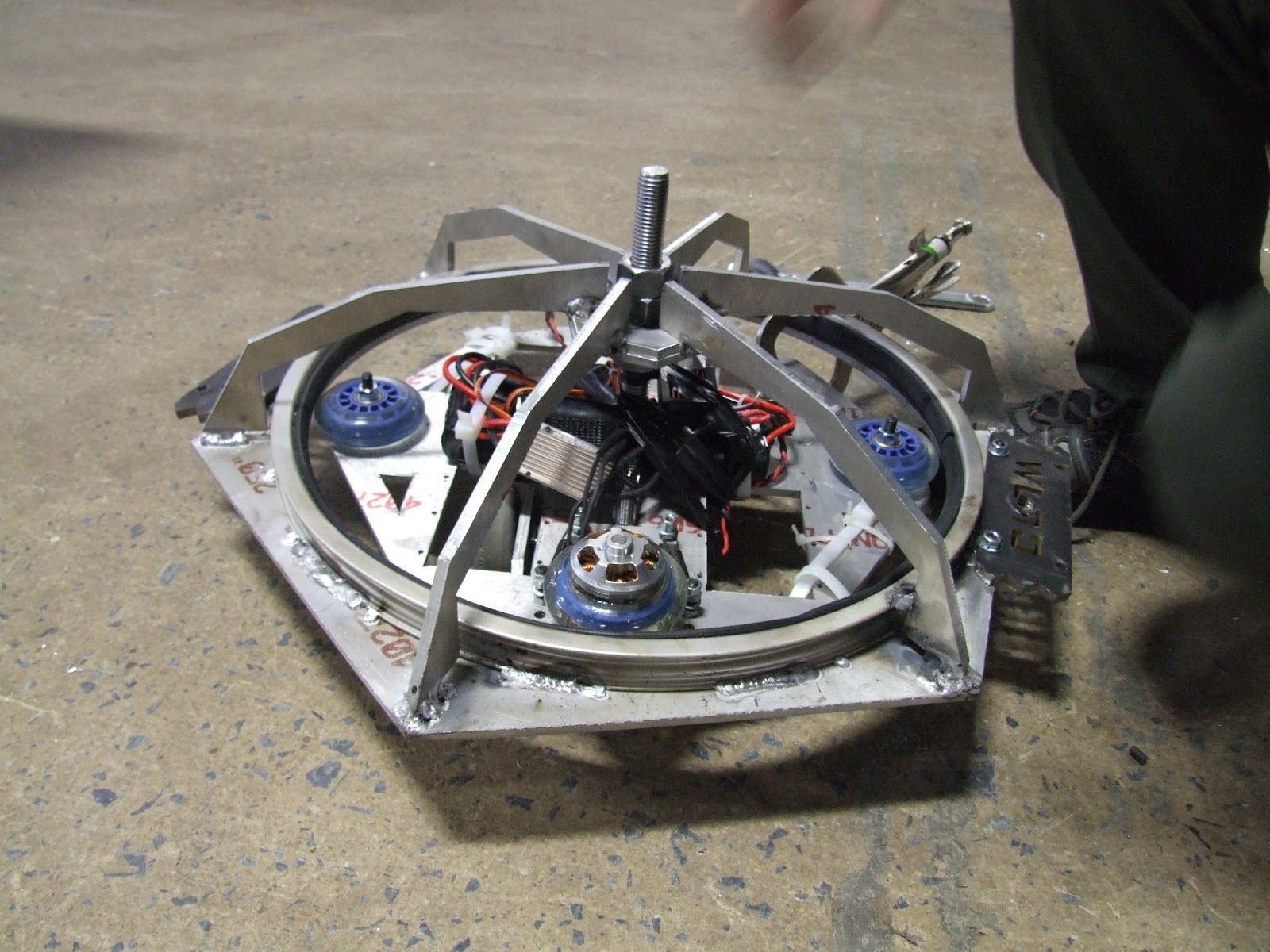
Above: One of the highlights of my robot weekend - Charles' robot "Uberclocker Advance"
picking up other robots to bash against other robots.
Read more by clicking the link below!
ARDUINO-based Musical Controller (Glove)
For my musical controller, I had a few thoughts of what I wanted to do before deciding to go for the glove. My initial ideas were to make (1) a portable theremin that you could attach on your wrist and use a string to control notes or a preset piece of music, or (2) a miniature gear-music box that creates music from changing the various speeds of motors and thus their gear ratios. However, the appeal of wearing my instrument controller and being able to manipulate it with my hands won, and I went with this gloved version.
The Instrument included:
-ARDUINO UNO
-Sparkfun Musical Instrument Shield
-ADXL345 Accelerometer
-2.2' Flex sensor
-4x Piezo elements
It was made of all commercial elements. With a bit of know-how wiring and coding, anyone could make this! :D The idea behind this was not just that it had to be a gloved instruments, but that the controls had to be minimalistic. Ideally, I could walk down the street (in these surgical purple latex gloves, yes) and tap and move my fingers by my side while I was walking, and not get attention attracted. Most times, gestural instruments or controllers for the hand that try and utilize hand motions to trigger actions have very grandiose, performance-like movements associated with them. Large sweeps of an arm to the side of the body, or twirling a hand in front of them - etc, etc. I wanted something that didn't make it look like I was interpretive dancing down the street. I wanted something where I could plug my headphones into the device, wear the gloves, pocket the device in a coat or pants pocket, and then make my own music while I walk, using normal actions like swinging my hand by my side, tapping my leg, or twiddling my thumb. Without attracting stares and without bothering others around you.

Above: Left hand - thumb controlled the flex sensor (pitch and expression),
fingers and hand controlled accelerometer (notes).
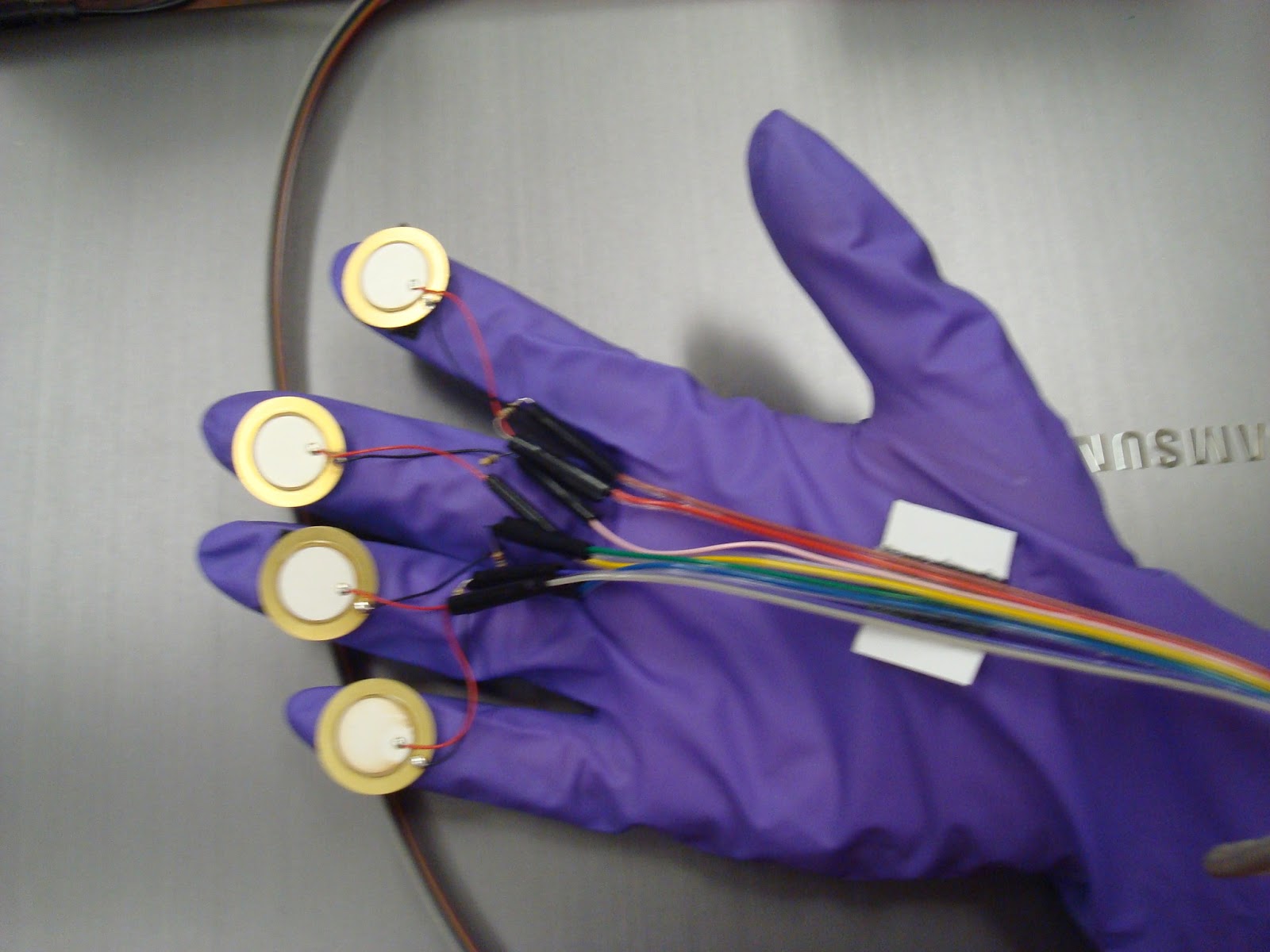
Above: Right hand - tapping thumb to each finger produced a different noise.
Worked like a drum tap machine.

Above: Left- Arduino Uno. Right - Musical Shield (with a branching ground wire I made)

Above: Labeled all my wires for easy dismantling and assembling.

Above: Accelerometer wiring - All the colors of the rainbow!

Above: Flex sensor wiring, with a bit of adhesive velcro on the back.
MOTORAMA 2013
Motorama was one of those huge events that meant you could get caught up with one event the entire weekend. (I personally didn't stray from the Robot Conflict area at all during the entire weekend, haha - except a handful of times to get food and go to the restroom.) The event had 6 weight classes (from lightest to heaviest: fairies, ants, beetles, hobby, feather, sportsman), and proceeded as a double-elimination bracket-style competition. Our group missed out on the Friday battles (fairies and antweights), but that was fine - the 3 robots traveling with us were all in the sportsman (30lb) class and wouldn't compete until Saturday anyways. This year, there were about 33 beetleweights, 17 hobbyweights, 17 featherweights, 15 30lb sportsmanweights, and teams coming from all over the US (including several bots from Ontario, Canada!) With all these bots, this meant the event took a really long time - but it was well-worth it!

Above: This is the car we took down to PA.
No rear-view visibility. But on the plus side, look how nice everything fit together!

Above: Foreground - tables for robots and their owners scrabbling for fixes.
Background - the rest of Motorama.
Not that many of us in the Robot Conflicts paid attention to that announcer voice, I'm sure. Why? Well, besides the adrenaline of our own little competition and the importance of knowing which robot was up when, we had our own awesome announcer - Roy Hellen. In a suit or armor. Sweeeet-

Above: Roy Hellen - The man decked out in a suit of armor.
Announcer to Motorama Robot Conflicts 2013.
(the one in the middle, if there was any doubt)

Above: Setting up the robot combat arena.

Above: There were about 30+ tables at in this area, several of which held multiple robots and people.

Above: Clocker enjoying a can of Bawls while Blitz and Atomic Bumble are being worked on.

Above: All the builders!
Many of the builders had multiple robots entered into multiple weight classes.

Above: People start shuffling in to see the robot fights!
More came throughout the busy hours (just before lunch, and after lunch),
and the audience was surprisingly very bloodthirsty for destruction.
(Most likely also fueled by Roy's taunts and energetic announcing)

Above: Our tired robot drivers in the back taking a nap, awaiting their turn.

Above: Our messy table, scattered with Bawls, bits of robots, miscellaneous tools, etc.

Above: The MIT table next to the Georgia Tech tables.
Quick repairs, go!

Above: The lovely prizes the robot contestants could win!

Above: Charles and Uberclocker Advance,
AKA Robotliftin' Superplexin' Terror
Above: Dane's Atomic Bumble,
assembled with the remains of another robot.
AKA Unpredictable Self-destructor

Above: Adam's Blitz,
Flippin' Headbashin' Rammer

Above: Jack Reacher and Tetanus

Above: Such and Such

Above: Nyx

Above: Deep Impact
Overall, Motorama was a blast! There was much talk between our group and Georgia Tech's group about next year's robots, so I'm definitely looking forward to 2014's trip! 8D
How can I get the code or the idea of the composition of this project؟؟
ReplyDeleteIt helps in the rapid and efficient change of environment from air to inert gas. It works well to out-gas the loaded contents and the containment during this process. vacuum glove box
ReplyDelete